





关键词 |
,水下淤泥清理机器人 |
面向地区 |
清淤方式的选择与控制
根据淤泥的情况合理选择清淤方式。如果淤泥比较松软,可直接采用吸泥方式,通过机器人的大功率吸泥泵将淤泥吸入储存罐。在吸泥过程中,要控制吸泥口的位置和角度,确保能够大程度地吸取淤泥。例如,将吸泥口贴近淤泥堆积较多的底部和角落。
清淤机器人通常由水下推进器、控制系统、机械臂、吸泥装置和传感器等部分组成。其工作原理主要基于自动化控制和机器人技术,通过预设程序或远程控制,使机器人完成一系列水下作业任务。具体而言,清淤机器人依靠推进器在水中移动,并使用传感器探测淤泥的位置和厚度。然后,通过机械臂或吸泥装置将淤泥清除,并运送到位置。
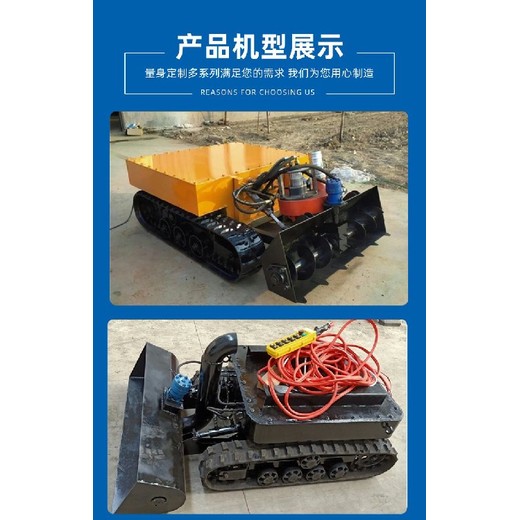
精细操作型清淤机器人
精细操作型清淤机器人配备灵活的机械臂,可以进行复杂的挖掘、抓取等操作,适合用于污水处理厂的沉淀池、管道清理等狭小空间或特定区域的清淤.
精细操作型清淤机器人适用于需要操作的场景,但其机械臂的操作复杂,维护难度较大。
山西萱澄机械设备有限公司成立于2023年04月12日,注册地位于山西省太原市小店区太榆路辅路588号聚瑞大酒店17栋1135号,法定代表人为刘洋。经营范围包括一般项目:机械设备销售;机械设备研发;矿山机械销售;液压动力机械及元件销售;电子元器件与机电组件设备销售;橡胶制品销售;五金产品零售;机械设备租赁;建筑工程机械与设备租赁;运输设备租赁服务;租赁服务(不含许可类租赁服务);建筑材料销售;轻质建筑材料销售;建筑装饰材料销售;建筑用金属配件销售;建筑用钢筋产品销售;建筑防水卷材产品销售(除依法须经批准的项目外,凭营业执照依法自主开展经营活动)